















Rådgiver
Trinmotorer adskiller sig meget fra de almindelige jævnstrømsmotorer, fordi de ikke har nogen børster. Men hvordan fungerer det nøjagtigt? Rotoren er konstrueret med permanente magneter og statoren af spoler. Statoren og rotoren har et stort antal poler, som ikke må komme i kontakt med hinanden. Når strøm passerer gennem en spole, drejes en pol i rotoren direkte over for en pol i statoren. Er du med? Motorakslen roterer en gang. Jo hurtigere impulserne er, desto hurtigere vil motoren køre.
Teksten forneden er maskineoversat fra den tyske originaltekst.
Trappemotorer er nu almindelige inden for automatisering. Den

er ideelle til alle applikationer, hvor der kræves nøjagtig placering. Trappemotordrivere bruges til at køre og styre dem. Du kan finde ud af, hvordan de fungerer, og hvad de skal kigge efter, når du køber dem i vores guide.
Hvad er trinmotorer?
Styring af stepmotorer med stepmotordrivere
Købskriterier for stepper-motorchauffører - hvad er vigtigt?
Vores praktiske tip: find den rigtige spænding
FAQ - Ofte stillede spørgsmål om stepper motor drivere
Hvad er trinmotorer?

Klassiske elektriske motorer er en integreret del af drevteknologien. De bruges til at sætte noget i bevægelse og fået til at dreje ved at anvende spænding. Afhængig af den mekaniske belastning er rotationshastigheden højere eller lavere. De er dog ikke egnede til applikationer, der kræver nøjagtighed. I sådanne tilfælde er såkaldte stepper-motorer det bedre valg, da de muliggør, at specifikke punkter kan nås og placeres nøjagtigt. Trappemotorer kan generere højt drejningsmoment selv ved lave hastigheder, fungerer meget pålideligt og er en del af mange industrielle og kommercielle anvendelser. De bruges blandt andet til at kontrollere robotter eller bruges i printere til at placere farveprikker ved siden af hinanden med meget korte intervaller. Trinmotorer bruges også i CNC-styringen. CNC (Computerized Numerical Control = "computerstøttet numerisk kontrol") er en elektronisk proces til styring af CNC-maskiner, der fremstiller arbejdsemner med ekstrem præcision. Disse inkluderer for eksempel CNC-fræsning, som for eksempel bruges til gravering eller til fræsning af 3D-objekter. Trinnmotorer er nu også installeret i motorkøretøjer, for eksempel til at styre klapperne i varme- eller klimaanlæg.
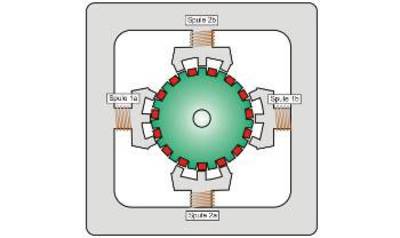
Trinmotorer fungerer anderledes end jævnstrøm eller jævnstrømsmotorer. En trinmotor er en børsteløs synkronmotor, der består af en drejelig del, den såkaldte rotor, og en ikke-drejelig del, statoren. Statoren er udstyret med spoler, der genererer et elektromagnetisk felt, og hvis viklinger er specifikt tændt og slukket, hvilket får rotoren til at begynde at rotere. Rotationsvinklen kan påvirkes ved at styre spolerne. En revolution består af et vist antal trin i samme størrelse. Hvert enkelt trin har brug for en impuls for at kunne gennemføres. Når pulsfrekvensen stiger, ændres trinbevægelsen til en kontinuerlig roterende bevægelse. Som regel genererer industrimotorer 200 trin pr. Omdrejning. Med andre ord: 200 diskrete trin er nødvendige for at dreje aksen helt i motoren.
Afhængig af deres design kan der adskilles flere typer trinmotorer: trinmotor med modstandsevne har en tandet blød jernrotor. De opnår høj hastighed og en præcis trinvinkel, men genererer kun et lille drejningsmoment. I modsætning hertil er permanente magnetstegsmotorer udstyret med en rotor i form af en cylindrisk permanentmagnet. De genererer større drejningsmoment end trinmotorers modstandsevne, men de fungerer i mindre end nøjagtige trinvinkler. Hybride trinmotorer er en hybrid af modvilje og permanentmagnet trinmotorer. De genererer højt drejningsmoment, præcise trinvinkler og er de mest anvendte i dag.
Trinmotorstyring med trinnmotordrivere
Trinmotorer er børsteløse og derfor mindre slidstærke end klassiske elektriske motorer, men de skal styres ved hjælp af en regulator for at kunne rotere. Trappemotordrivere tager denne opgave. Som navnet antyder har de primært funktionen til at køre motoren, men de tjener også til målrettet trinmotorstyring, for eksempel ved at regulere hastighed, retning, kraft eller position.
Trappemotordrivere arbejder sammen med en såkaldt steppermotorindekser eller steppermotorstyring, som normalt er forbundet opstrøms. Det tilvejebringer trin- og retningsstyringssignaler, som stepmotordriveren modtager og konverterer til elektriske signaler, der er nødvendige for motorens drift. Kommunikation med stepmotorindeksen sikres via en passende grænseflade (f.eks. RS-232 eller RS-485). Det kan tilsluttes en pc, hvis kommandoer omdannes til de passende trin- og retningsstyringssignaler og til sidst videresender dem til trinmotordriveren. Versioner til selvstændig drift er også tilgængelige.

Trappemotordrivere påvirker den aktuelle strøm, der strømmer gennem viklingerne i motoren og bestemmer i sidste ende, hvor høj eller lav hastighed og drejningsmoment er. Nogle drivere har også et integreret ur, som gør det muligt at justere hastigheden udefra, f.eks. Ved at betjene en joystick. Hvor høj strømstrømmen er, og hvor lang tid det tager for viklingerne at blive "ophidset" afhænger af motorens induktans.
Der er ingen fast måde at konfigurere motordrivere på. Konfigurationen varierer afhængigt af driver og kort. Passende software bruges ofte, men der er også muligheden for at foretage indstillinger via hardware. Dette er normalt tilfældet, hvis der er en eller flere DIP-afbrydere på tavlen.
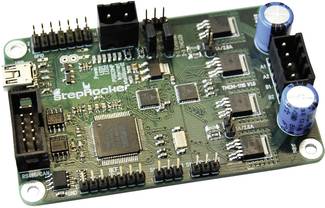
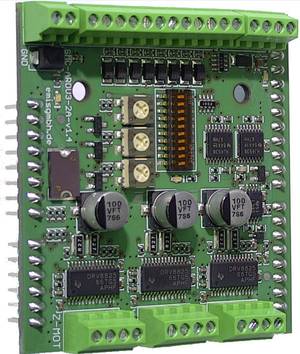
I vores online butik finder du et stort udvalg af trinmotordrivere i form af kredsløb, moduler og trinstikker, der er egnede til forskellige anvendelsesområder.
Vores praktiske tip: find den rigtige spænding
Mange trinmotordrivere kan generere en spænding, der er over motorens nominelle spænding. Driverens udgangsspænding er relateret til drejningsmoment og hastighed og bør ideelt set være så høj som muligt. Det er dog ikke let at finde den rigtige spænding. Grundlæggende anbefales det ikke at betjene driveren og motoren med maksimal spænding med det samme, men at starte med en lav spænding og gradvist øge den. I denne sammenhæng har steppmotordrivere med strømstyring vist sig at være praktiske. De forhindrer, at der opstår en overstrøm ved at begrænse højere spændinger til motorens nominelle strøm.
Købskriterier for stepper-motorchauffører - hvad er vigtigt?
Når du vælger en passende trinmotordriver, skal der først tages højde for den maksimale fasestrøm. Maksimale fasestrømme er specificeret for at modvirke varmeudvikling i motorens spoler. Du kan filtrere i vores online butik i henhold til dette kriterium.
For at forhindre overophedning og potentielt tilknyttet skade på elektronikken, skal trinmotordrivere ideelt udstyres med en køleplade eller ventilator. Nogle drivere slukker simpelthen automatisk i tilfælde af overdreven varme. Det er muligt at eftermontere chauffører med en kølelegeme. Det er dog vigtigt at være opmærksom på kompatibiliteten mellem de to komponenter. Du kan finde information om dette i producentens beskrivelse.
Grænseflader kan være et afgørende købskriterium, hvis trappemotordriveren skal styres via en pc. Ikke hver bærbar eller stationær pc har en RS-232 eller RS-483 interface. I sådanne tilfælde giver det mening at vælge en driver med en USB-forbindelse.
Hvis du vil styre din stepper motor driver med en Arduino eller en anden mikrocontroller, er det vigtigt at sikre, at den respektive version er kompatibel med den. Relevante data findes i producentens beskrivelse.
FAQ - Ofte stillede spørgsmål om stepper motor drivere
Hvad er lukkede loopmotorer?
Motorer med lukket sløjfe er imod open-loop-motorer. Åben sløjfe betyder noget som "åben kontrolsløjfe", hvilket betyder, at føreren ikke modtager nogen feedback under motorstyringen. Der registreres derfor ikke et trinstab, hvilket kan resultere i unøjagtig positionering. Lukket sløjfe betegner en lukket kontrolsløjfe. Motorer, der arbejder i henhold til dette princip, giver positions feedback og korrigerer eventuelle fejl, så der overhovedet ikke er tab af trin.
Hvad er H-broer?
H-broer bruges til at kontrollere bipolare trinnmotorer, der kræver polaritetsvending af driftsstrømmen. Et kredsløb med H-broer består af 4 halvlederafbrydere (f.eks. Transistorer) og skal oprettes til hver vikling.